> For the complete documentation index, see [llms.txt](https://sharinghub.kittenbot.hk/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://sharinghub.kittenbot.hk/actuators/geekservo9g_motor.md).
# Geekservo 9g電機
這是一款兼容樂高件的減速直流電機,輸出軸為樂高十字軸。主要用作驅動如車子,齒輪般動力機械。
### 產品參數
* 工作電壓:3.3V\~6V
* 額定電壓:4.8V
* 額定電流:200ma
* 堵轉電流:700ma
* 打滑電流:450ma
* 最大扭力:500g/cm(4.8V)
* 最高轉速:70rpm(3V供電情况下)
* 重量:12.4g
* 接口:紅黑線
### 使用注意事項
* 這只是一種小型電機,使用情境的扭力和電壓需求請不要過大。
* Geekservo電機沒有線序要求,調換線序只影響轉動方向。
* 禁止長時間超出堵轉電流,否則會燒壞電機。
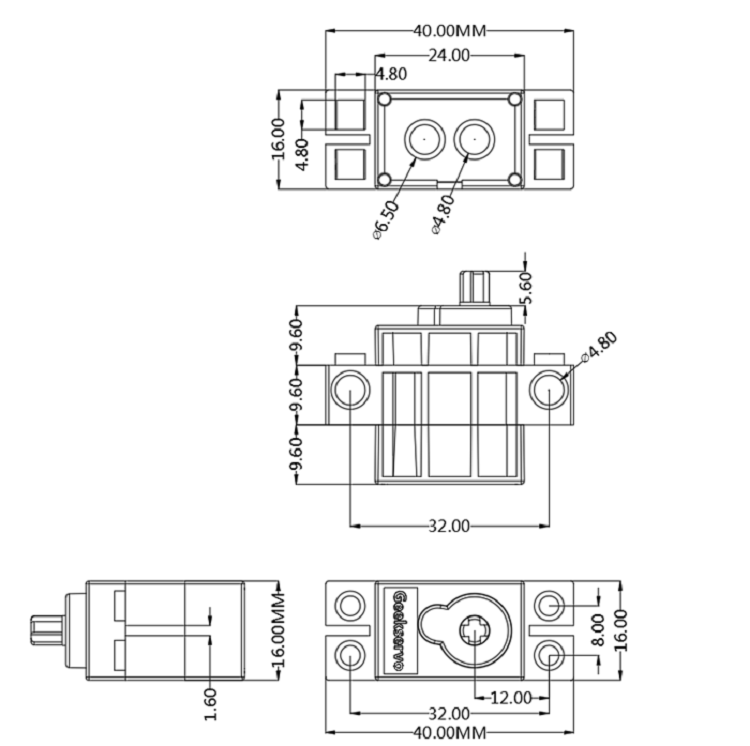
### 規格尺寸
#### 樂高孔單位:
* 長度:5孔
* 闊度:2孔
* 高度:3孔
* 輸出軸:樂高十字軸
#### mm單位:
* 長度:40mm
* 闊度:16mm
* 高度:34.4mm
* 輸出軸:樂高十字軸
### Geekservo特色
* 極力子過載保護:
* 遇到輸出軸被暴力扭擰會啟動極力子進行跳齒保護,發出「噠噠噠」的聲音。不會損毀齒輪。
* 安裝方式靈活:
* 支援樂高標準磚和Technic插孔,輸出軸亦是樂高標準十字軸。
* 輕盈小巧:
* 方便製作各種小型機械。
## 使用教學
## Robotbit EDU/2.2
### 接線方法
#### Robotbit 2.2
 #### Robotbit EDU
#### Robotbit EDU
 ### MakeCode編程教學
#### 加載Robotbit插件:
#### 在擴展頁直接搜尋robotbit (robotbit已經過微軟認證,可以直接搜尋)
#### 你亦可以用插件地址搜尋
robotbit插件:
#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 馬達積木塊:
### MakeCode編程教學
#### 加載Robotbit插件:
#### 在擴展頁直接搜尋robotbit (robotbit已經過微軟認證,可以直接搜尋)

#### 你亦可以用插件地址搜尋
robotbit插件:
#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 馬達積木塊:
 #### 參考程式
{% embed url="" %}
## Armourbit
### 接線方法
#### 參考程式
{% embed url="" %}
## Armourbit
### 接線方法
 ### MakeCode編程教學
#### 加載Powerbrick插件:
#### 在擴展頁直接搜尋Powerbrick (powerbrick已經過微軟認證,可以直接搜尋)

#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 參考程式
{% embed url="" %}
## Meowbit
### 接線方法
#### Robotbit 2.2
#### Robotbit EDU
### MakeCode Arcade編程教學
#### 加載robotbit插件:
#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 電機積木塊:
### MakeCode編程教學
#### 加載Powerbrick插件:
#### 在擴展頁直接搜尋Powerbrick (powerbrick已經過微軟認證,可以直接搜尋)

#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 參考程式
{% embed url="" %}
## Meowbit
### 接線方法
#### Robotbit 2.2
#### Robotbit EDU
### MakeCode Arcade編程教學
#### 加載robotbit插件:
#### [詳細方法](/programmingplatforms/makecode/kittenbotandmakecode.md)
#### 電機積木塊:
 #### 參考程式
{% embed url="" %}
## 插件版本與更新
插件可能會不定時推出更新,改進功能。亦有時候我們可能需要轉用舊版插件才可使用某些功能。
詳情請參考: [Makecode插件版本更換](/programmingplatforms/makecode/makecodeextupdate.md)
#### 參考程式
{% embed url="" %}
## 插件版本與更新
插件可能會不定時推出更新,改進功能。亦有時候我們可能需要轉用舊版插件才可使用某些功能。
詳情請參考: [Makecode插件版本更換](/programmingplatforms/makecode/makecodeextupdate.md)