> For the complete documentation index, see [llms.txt](https://sharinghub.kittenbot.hk/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://sharinghub.kittenbot.hk/kits/lego_robot_arm/futureboardprogram.md).
# 機械臂未來板參考程式
### 組裝教學
[下載組裝說明書](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/lego_robot_arm/lego_robot_arm.pdf)
 ### 參考接線
### 參考接線
 #### KittenBlock參考程式
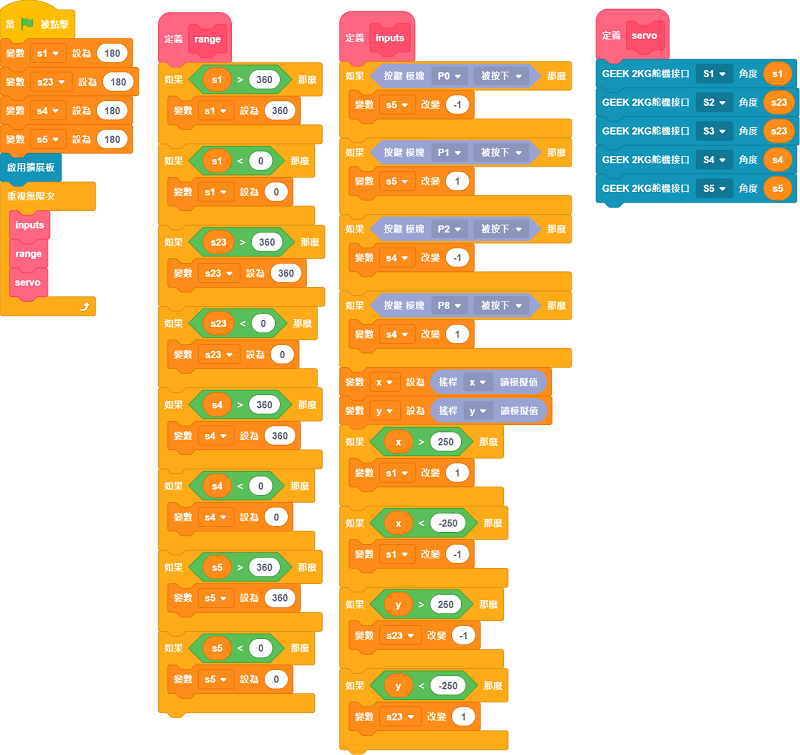
[參考程式](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/lego_robot_arm/robot_arm.sb3)
#### Python參考程式
```
#/bin/python
from future import *
from sugar import *
import robotbit
x = 0
s1 = 0
s23 = 0
s4 = 0
s5 = 0
y = 0
def inputs():
global x,s1,s23,s4,s5,y
if Button("P1").value() == 0:
s5 += -1
if Button("P0").value() == 0:
s5 += 1
if Button("P2").value() == 0:
s4 += -1
if Button("P8").value() == 0:
s4 += 1
x = Joystick().value('x')
y = Joystick().value('y')
if x > 250:
s1 += 1
if x < -250:
s1 += -1
if y > 250:
s23 += -1
if y < -250:
s23 += 1
def range():
global x,s1,s23,s4,s5,y
if s1 > 360:
s1 = 360
if s1 < 0:
s1 = 0
if s23 > 360:
s23 = 360
if s23 < 0:
s23 = 0
if s4 > 360:
s4 = 360
if s4 < 0:
s4 = 0
if s5 > 360:
s5 = 360
if s5 < 0:
s5 = 0
def servo():
global x,s1,s23,s4,s5,y
robot.geekServo2kg(1, s1)
robot.geekServo2kg(2, s23)
robot.geekServo2kg(3, s23)
robot.geekServo2kg(4, s4)
robot.geekServo2kg(5, s5)
s1 = 180
s23 = 180
s4 = 180
s5 = 180
robot = robotbit.RobotBit()
while True:
inputs()
range()
servo()
```
[參考程式](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/lego_robot_arm/robot_arm.py)
#### KittenBlock參考程式

[參考程式](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/lego_robot_arm/robot_arm.sb3)
#### Python參考程式
```
#/bin/python
from future import *
from sugar import *
import robotbit
x = 0
s1 = 0
s23 = 0
s4 = 0
s5 = 0
y = 0
def inputs():
global x,s1,s23,s4,s5,y
if Button("P1").value() == 0:
s5 += -1
if Button("P0").value() == 0:
s5 += 1
if Button("P2").value() == 0:
s4 += -1
if Button("P8").value() == 0:
s4 += 1
x = Joystick().value('x')
y = Joystick().value('y')
if x > 250:
s1 += 1
if x < -250:
s1 += -1
if y > 250:
s23 += -1
if y < -250:
s23 += 1
def range():
global x,s1,s23,s4,s5,y
if s1 > 360:
s1 = 360
if s1 < 0:
s1 = 0
if s23 > 360:
s23 = 360
if s23 < 0:
s23 = 0
if s4 > 360:
s4 = 360
if s4 < 0:
s4 = 0
if s5 > 360:
s5 = 360
if s5 < 0:
s5 = 0
def servo():
global x,s1,s23,s4,s5,y
robot.geekServo2kg(1, s1)
robot.geekServo2kg(2, s23)
robot.geekServo2kg(3, s23)
robot.geekServo2kg(4, s4)
robot.geekServo2kg(5, s5)
s1 = 180
s23 = 180
s4 = 180
s5 = 180
robot = robotbit.RobotBit()
while True:
inputs()
range()
servo()
```
[參考程式](https://github.com/kittenbothk/kittenbothk/raw/master/Kits/lego_robot_arm/robot_arm.py)